“第020课 SPI裸板”的版本间的差异
| 第752行: | 第752行: | ||
=第006节_使用SPI控制器 = | =第006节_使用SPI控制器 = | ||
前面我们都是通过GPIO管脚来实现的SPI通信,这节我们使用2440里面的GPIO控制器来实现SPI通信。 | 前面我们都是通过GPIO管脚来实现的SPI通信,这节我们使用2440里面的GPIO控制器来实现SPI通信。 | ||
| + | |||
前面使用GPIO发送数据时,是手工的控制时钟线、数据线,我们使用SPI控制器的话,只需要 | 前面使用GPIO发送数据时,是手工的控制时钟线、数据线,我们使用SPI控制器的话,只需要 | ||
| − | + | 把数据写入寄存器,它就可以帮我自动那些时钟线和数据线,我们继续在上一节的基础上修改,添加一个文件s3c2440_spi.c和s3c2440_spi.h,同时修改Makefile,替换gpio_spi.c为s3c2440_spi.o。 | |
从初始化函数开始,需要管脚初始化和SPI控制器初始化: | 从初始化函数开始,需要管脚初始化和SPI控制器初始化: | ||
| 第787行: | 第788行: | ||
</syntaxhighlight> | </syntaxhighlight> | ||
然后是SPI控制器的初始化,控制器的初始化可以参考芯片手册介绍的编程步骤:<br> | 然后是SPI控制器的初始化,控制器的初始化可以参考芯片手册介绍的编程步骤:<br> | ||
| − | [[File:chapter20_lesson6_001.jpg| | + | [[File:chapter20_lesson6_001.jpg|700px]] |
首先是设置波特率,要根据外设所能接受的范围来设置,比如查阅OLED的芯片手册得知其时钟最小值为100ns,即最小为10MHz;Flash时钟支持最大104MHz,为了代码简单,就直接取10MHz,根据等式推出寄存器值: | 首先是设置波特率,要根据外设所能接受的范围来设置,比如查阅OLED的芯片手册得知其时钟最小值为100ns,即最小为10MHz;Flash时钟支持最大104MHz,为了代码简单,就直接取10MHz,根据等式推出寄存器值: | ||
| 第798行: | 第799行: | ||
根据参考流程,接下来设置SPI控制寄存器:<br> | 根据参考流程,接下来设置SPI控制寄存器:<br> | ||
| − | [[File:chapter20_lesson6_001.jpg| | + | [[File:chapter20_lesson6_001.jpg|700px]] |
[6:5]设置为查询模式: 00 polling mode | [6:5]设置为查询模式: 00 polling mode | ||
| 第832行: | 第833行: | ||
} | } | ||
</syntaxhighlight> | </syntaxhighlight> | ||
| − | 发送数据时,先检查状态寄存器,判断发送/ | + | 发送数据时,先检查状态寄存器,判断发送/接收数据是否准备好了,准备好后就把数据放在寄存器SPTDAT1里,SPI控制器就自己控制时序把数据自动发送出去了。 |
<syntaxhighlight lang="c" > | <syntaxhighlight lang="c" > | ||
void SPISendByte(unsigned char val) | void SPISendByte(unsigned char val) | ||
| 第841行: | 第842行: | ||
</syntaxhighlight> | </syntaxhighlight> | ||
| − | + | 接收数据时,先写0xFF到寄存器SPTDAT1,再检查状态寄存器,判断发送/接收数据是否准备好了,准备好后就读取寄存器SPTDAT1,读取出来的就是接收到的数据。 | |
<syntaxhighlight lang="c" > | <syntaxhighlight lang="c" > | ||
2018年1月29日 (一) 14:26的版本
目录
第001节_SPI协议介绍
市面上的开发板很少接有SPI设备,但是SPI协议在工作中经常用到。我们开发了SPI模块,上面有SPI Flash和SPI OLED。OLED就是一块显示器。
我们裸板程序会涉及两部分:
- 用GPIO模拟SPI
- 用S3C2440的SPI控制器
我们先介绍下SPI协议,硬件框架如下:

SCK:提供时钟 DO:作为数据输出 DI:作为数据输入 CS0/CS1:作为片选
同一时刻只能有一个SPI设备处于工作状态。
假设现在2440传输一个0x56数据给SPI Flash,时序如下: 首先CS0先拉低选中SPI Flash,0x56的二进制就是0b0101 0110,因此在每个SCK时钟周期,DO输出对应的电平。
SPI Flash会在每个时钟周期的上升沿读取D0上的电平。
首先CS0先拉低选中SPI Flash,0x56的二进制就是0b0101 0110,因此在每个SCK时钟周期,DO输出对应的电平。
SPI Flash会在每个时钟周期的上升沿读取D0上的电平。
在SPI协议中,有两个值来确定SPI的模式。 CPOL:表示SPICLK的初始电平,0为电平,1为高电平 CPHA:表示相位,即第一个还是第二个时钟沿采样数据,0为第一个时钟沿,1为第二个时钟沿
| CPOL | CPHA | 模式 | 含义 |
|---|---|---|---|
| 0 | 0 | 0 | 初始电平为低电平,在第一个时钟沿采样数据 |
| 0 | 1 | 1 | 初始电平为低电平,在第二个时钟沿采样数据 |
| 1 | 0 | 2 | 初始电平为高电平,在第一个时钟沿采样数据 |
| 1 | 1 | 3 | 初始电平为高电平,在第二个时钟沿采样数据 |
我们常用的是模式0和模式3,因为它们都是在上升沿采样数据,不用去在乎时钟的初始电平是什么,只要在上升沿采集数据就行。
极性选什么?格式选什么?通常去参考外接的模块的芯片手册。比如对于OLED,查看它的芯片手册时序部分:
SCLK的初始电平我们并不需要关心,只要保证在上升沿采样数据就行。
第002节_使用GPIO实现SPI协议操作OLED
现在开始写代码,使用GPIO实现SPI协议操作。
我们现在想要操作OLED,通过三条线(SCK、DO、CS)与OLED相连,这里没有DI是因为2440只会向OLED传数据而不用接收数据。
我们要用GPIO来实现SOC向OLED写数据,这一层用gpio_spi.c来实现,负责发送数据。
对于OLED,有专门的指令和数据格式,要传输的数据内容,在oled.c这一层来实现,负责组织数据。
因此,我们需要实现以上两个文件。
需要实现的函数:先SPI初始化SPIInt(),再初始化OLEDOLEDInit(),最后再显示OLEDPrint()。
新建一个gpio_spi.c文件,实现SPI初始化SPIInt()
void SPIInit(void)
{
/* 初始化引脚 */
SPI_GPIO_Init();
}
再具体实现SPI_GPIO_Init()。这里使用GPIO实现SPI协议,电路图如下:
GPF1作为OLED片选引脚,设置为输出; GPG2作为FLASH片选引脚,设置为输出; GPG4作为OLED的数据(Data)/命令(Command)选择引脚,设置为输出; GPG5作为SPI的MISO,设置为输入; GPG6作为SPI的MOSI,设置为输出; GPG7作为SPI的时钟CLK,设置为输出;
/* 用GPIO模拟SPI */
static void SPI_GPIO_Init(void)
{
/* GPF1 OLED_CSn output */
GPFCON &= ~(3<<(1*2));
GPFCON |= (1<<(1*2));
GPFDAT |= (1<<1);
/* GPG2 FLASH_CSn output
* GPG4 OLED_DC output
* GPG5 SPIMISO input
* GPG6 SPIMOSI output
* GPG7 SPICLK output
*/
GPGCON &= ~((3<<(2*2)) | (3<<(4*2)) | (3<<(5*2)) | (3<<(6*2)) | (3<<(7*2)));
GPGCON |= ((1<<(2*2)) | (1<<(4*2)) | (1<<(6*2)) | (1<<(7*2)));
GPGDAT |= (1<<2);
}
再新建一个oled.c文件,以实现初始化OLEDOLEDInit()
void OLEDInit(void)
{
/* 向OLED发命令以初始化 */
}
查阅OLED数据手册SPEC UG-2864TMBEG01.pdf可以得知其初始化流程和参考的初始化代码:
void OLEDInit(void)
{
/* 向OLED发命令以初始化 */
OLEDWriteCmd(0xAE); /*display off*/
OLEDWriteCmd(0x00); /*set lower column address*/
OLEDWriteCmd(0x10); /*set higher column address*/
OLEDWriteCmd(0x40); /*set display start line*/
OLEDWriteCmd(0xB0); /*set page address*/
OLEDWriteCmd(0x81); /*contract control*/
OLEDWriteCmd(0x66); /*128*/
OLEDWriteCmd(0xA1); /*set segment remap*/
OLEDWriteCmd(0xA6); /*normal / reverse*/
OLEDWriteCmd(0xA8); /*multiplex ratio*/
OLEDWriteCmd(0x3F); /*duty = 1/64*/
OLEDWriteCmd(0xC8); /*Com scan direction*/
OLEDWriteCmd(0xD3); /*set display offset*/
OLEDWriteCmd(0x00);
OLEDWriteCmd(0xD5); /*set osc division*/
OLEDWriteCmd(0x80);
OLEDWriteCmd(0xD9); /*set pre-charge period*/
OLEDWriteCmd(0x1f);
OLEDWriteCmd(0xDA); /*set COM pins*/
OLEDWriteCmd(0x12);
OLEDWriteCmd(0xdb); /*set vcomh*/
OLEDWriteCmd(0x30);
OLEDWriteCmd(0x8d); /*set charge pump enable*/
OLEDWriteCmd(0x14);
}
因此我们还要先实现OLEDWriteCmd()函数,对于OLED,除了SPI的片选、时钟、数据引脚,还有一个数据/命令切换引脚。
这里的D/C即数据(Data)/命令(Command)选择引脚,它为高电平时,OLED即认为收到的是数据;它为低电平时,OLED即认为收到的是命令。
对于OLED,命令由开启/关闭显示、背光亮度等,具体有什么命令,可以查阅OLED的主控芯片手册SSD1306-Revision 1.1 (Charge Pump).pdf,在9 COMMAND TABLE 有相关命令的介绍。
因此,在编写OLEDWriteCmd()时,需要先设置为命令模式:
static void OLEDWriteCmd(unsigned char cmd)
{
OLED_Set_DC(0); /* command */
OLED_Set_CS(0); /* select OLED */
SPISendByte(cmd);
OLED_Set_CS(1); /* de-select OLED */
OLED_Set_DC(1); /* */
}
即:先设置为命令模式,再片选OLED,再传输命令,再恢复成原来的模式和取消片选。
片选函数和模式切换函数都比较简单,设置为对应的高低电平即可:
static void OLED_Set_DC(char val)
{
if (val)
GPGDAT |= (1<<4);
else
GPGDAT &= ~(1<<4);
}
static void OLED_Set_CS(char val)
{
if (val)
GPFDAT |= (1<<1);
else
GPFDAT &= ~(1<<1);
}
还剩下SPISendByte()函数,它属于SPI协议,放在gpio_spi.c里面:
void SPISendByte(unsigned char val)
{
int i;
for (i = 0; i < 8; i++)
{
SPI_Set_CLK(0);
SPI_Set_DO(val & 0x80);
SPI_Set_CLK(1);
val <<= 1;
}
}
发送数据要满足SPI的时序要求,参考前面的介绍:
先设置CLK为低,然后数据引脚输出数据的最高位,然后CLK为高,在CLK这个上升沿中,OLED就读取了一位数据。接着左移一位,将原来的第7位移动到了第8位,重复8次,传输完成。
再完成SPI_Set_CLK()和SPI_Set_DO():
static void SPI_Set_CLK(char val)
{
if (val)
GPGDAT |= (1<<7);
else
GPGDAT &= ~(1<<7);
}
static void SPI_Set_DO(char val)
{
if (val)
GPGDAT |= (1<<6);
else
GPGDAT &= ~(1<<6);
}
至此,SPI初始化和OLED初始化就基本完成了,接下来就是OLED显示部分。
先了解一下OLED显示的原理:
OLED长有128个像素,宽有64个像素,每个像素用一位来表示,为1则亮,为0则灭。
每一个字节数据Datax控制每列8个像素,在显存里面存放Data数据。
之后所需的操作就是把数据写到显存里面去,如何写到显存可以拆分成两个问题:
①怎么发地址
②怎么发数据
OLED主控的手册里介绍了三种地址模式,我们常用的是页地址模式(Page addressing mode (A[1:0]=10xb)),它把显存的64行分为8页,每页对应8行;选中某页后,再选择某列,然后就可以往里面写数据了,每写一个数据,地址就会加1,一直写到最右端的位置,他会自动跳到最左端。
通过命令来实现发送页地址和列地址,其中列地址分为两次发送,先发送低字节,再发送高字节。
假设每个字符数据大小为8x16,假如第一个字符位置为(page,col),相邻的右边就是(page,col+8),写满一行跳至下一行的坐标就是(page+2,col)。
/* page: 0-7
* col : 0-127
* 字符: 8x16象素
*/
void OLEDPrint(int page, int col, char *str)
{
int i = 0;
while (str[i])
{
OLEDPutChar(page, col, str[i]);
col += 8;
if (col > 127)
{
col = 0;
page += 2;
}
i++;
}
}
只要字符数组str[i]有数据,就调用OLEDPutChar(page, col, str[i])在指定位置显示第一个字符,然后位置向右移动一个字符的大小,如果遇到行尾,再进行换行,就这样依次显示完所有字符。
现在开始实现最重要的OLEDPutChar()函数。把一个字符在OLED上显示出来需要以下几个步骤:
a. 得到字模
b. 发给OLED
字模我们可以从网上搜索相关资料获取到,将字模的数组oled_asc2_8x16[95][16]放在oledfont.c里面,字符从空格开始,因此每次减去一个空格才是我们想要的字符。
如图所示一个字符,先以(page, col)为起点,显示8位数据,再换行,以(page+1, col)为起点显示8位数据。
/* page: 0-7
* col : 0-127
* 字符: 8x16象素
*/
void OLEDPutChar(int page, int col, char c)
{
int i = 0;
/* 得到字模 */
const unsigned char *dots = oled_asc2_8x16[c - ' '];
/* 发给OLED */
OLEDSetPos(page, col);
/* 发出8字节数据 */
for (i = 0; i < 8; i++)
OLEDWriteDat(dots[i]);
OLEDSetPos(page+1, col);
/* 发出8字节数据 */
for (i = 0; i < 8; i++)
OLEDWriteDat(dots[i+8]);
}
显示一个字符,就先获取字模数据,接着发出8字节数据,再换行发出8字节数。
再来实现OLED设置坐标位置函数,先设置page:
D0~D2表示page数据,D3-D7是固定的值,因此每次写的命令内容为0xB0+page;
再设置列:
分两次发送,显示发送低字节4位,再发送高字节四位;
static void OLEDSetPos(int page, int col)
{
OLEDWriteCmd(0xB0 + page); /* page address */
OLEDWriteCmd(col & 0xf); /* Lower Column Start Address */
OLEDWriteCmd(0x10 + (col >> 4)); /* Lower Higher Start Address */
}
前面提到了OLED主控有三种地址模式,我们常用的是页地址模式(Page addressing mode (A[1:0]=10xb)),虽然这是默认的摸索,但还是设置一下比较好:
即先发送0x20,再设置A[1:0]=10:
static void OLEDSetPageAddrMode(void)
{
OLEDWriteCmd(0x20);
OLEDWriteCmd(0x02);
}
在显示中,一般都需一个清屏函数来清空当前可能显示的数据。清屏函数比较简单,往所有位置里面写0即可:
static void OLEDClear(void)
{
int page, i;
for (page = 0; page < 8; page ++)
{
OLEDSetPos(page, 0);
for (i = 0; i < 128; i++)
OLEDWriteDat(0);
}
}
再把地址模式OLEDSetPageAddrMode()和清屏函数OLEDClear()放在SPI_GPIO_Init()里,在Makefile加上gpio_spi.o和oled.o。
最后在主函数里加上初始化和显示函数:
SPIInit(); OLEDInit(); OLEDPrint(0,0,"www.100ask.net, 100ask.taobao.com");
第003节_SPI_FLASH编程_读ID
这节讲解如何使用SPI操作Flash,我们在上节课的代码上进行修改,添加一个文件 spi_flash.c 和其头文件 spi_flash.h 。
我们先做一个最简单的spi操作,读取Flash的ID, SPIFlashID() 。
Flash的ID有厂家ID和设备ID,分别用pMID和pDID来保存。
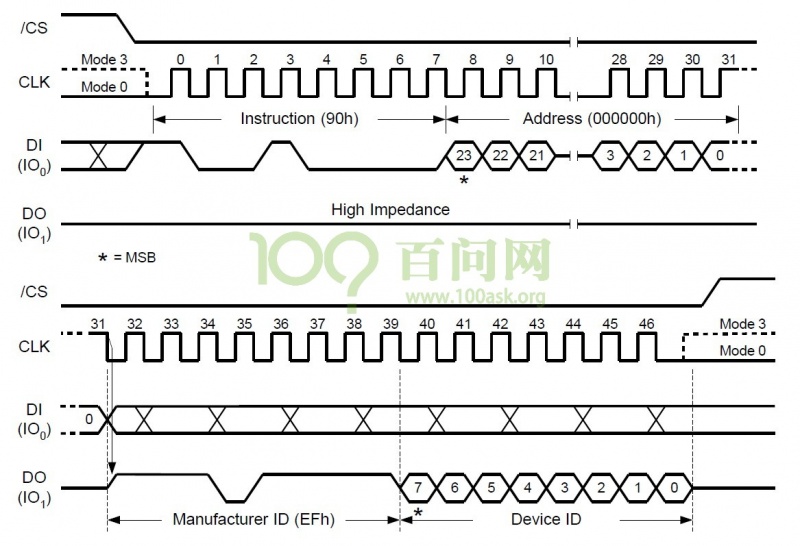
根据Flash的芯片手册 W25Q16DV.pdf 可以知道需要先发出一个指令0x90,再发送24位的地址0,再读取数据前8位是设备ID,然后是8位设备ID。进行操作前必须要片选SPI Flash,片选完还是释放SPI Flash:

void SPIFlashReadID(int *pMID, int *pDID)
{
SPIFlash_Set_CS(0); /* 选中SPI FLASH */
SPISendByte(0x90);
SPIFlashSendAddr(0);
*pMID = SPIRecvByte();
*pDID = SPIRecvByte();
SPIFlash_Set_CS(1);
}
把其中的发送24地址封装成了一个函数 SPIFlashSendAddr() :
static void SPIFlashSendAddr(unsigned int addr)
{
SPISendByte(addr >> 16);
SPISendByte(addr >> 8);
SPISendByte(addr & 0xff);
}
依次完成上面的子函数,先是SPI片选,上一节的原理图可以看到SPI Flash的片选是GPG2:
static void SPIFlash_Set_CS(char val)
{
if (val)
GPGDAT |= (1<<2);
else
GPGDAT &= ~(1<<2);
}
SPISendByte() 和前面OLED的是一样的,就不用写了,因此就只剩下 SPIRecvByte() ,放在 gpio_spi.c 里面实现:
unsigned char SPIRecvByte(void)
{
int i;
unsigned char val = 0;
for (i = 0; i < 8; i++)
{
val <<= 1;
SPI_Set_CLK(0);
if (SPI_Get_DI())
val |= 1;
SPI_Set_CLK(1);
}
return val;
}
在每个时钟周期读取DI引脚上的值,对于SOC就是MISO引脚:
static char SPI_Get_DI(void)
{
if (GPGDAT & (1<<5))
return 1;
else
return 0;
}
至此,读取Flash的ID基本实现,最后在主函数里调用打印,分别在串口和OLED上显示:
SPIFlashReadID(&mid, &pid);
printf("SPI Flash : MID = 0x%02x, PID = 0x%02x\n\r", mid, pid);
sprintf(str, "SPI : %02x, %02x", mid, pid);
OLEDPrint(4,0,str);
Makefile记得加上新生成的 spi_flash.o 。
第004节_SPI_FLASH编程_读写
Flash作为一个存储芯片,最重要的就是存储和读取存储的数据,这节我们就实现Flash里数据的读写。 对于Flash,每次写操作需要的步骤如下:
- 去保护(写使能、写状态寄存器);
- 擦除(写使能)
- 编写入数据(写使能)
可以看出对于写操作,每次都要写使能,查阅芯片手册,可以看出写使能比较简单,只需要发送0x06命令即可:
反之,写保护则是写入0x04:
static void SPIFlashWriteEnable(int enable)
{
if (enable)
{
SPIFlash_Set_CS(0);
SPISendByte(0x06);
SPIFlash_Set_CS(1);
}
else
{
SPIFlash_Set_CS(0);
SPISendByte(0x04);
SPIFlash_Set_CS(1);
}
}
然后是读写状态寄存器,状态寄存器有两个,通过0x05读取状态寄存器1,通过0x35读取状态寄存器2:
static unsigned char SPIFlashReadStatusReg1(void)
{
unsigned char val;
SPIFlash_Set_CS(0);
SPISendByte(0x05);
val = SPIRecvByte();
SPIFlash_Set_CS(1);
return val;
}
static unsigned char SPIFlashReadStatusReg2(void)
{
unsigned char val;
SPIFlash_Set_CS(0);
SPISendByte(0x35);
val = SPIRecvByte();
SPIFlash_Set_CS(1);
return val;
}
写状态寄存器则是先发出0x01命令,再依次发送状态寄存器1、状态寄存器2:
static void SPIFlashWriteStatusReg(unsigned char reg1, unsigned char reg2)
{
SPIFlashWriteEnable(1);
SPIFlash_Set_CS(0);
SPISendByte(0x01);
SPISendByte(reg1);
SPISendByte(reg2);
SPIFlash_Set_CS(1);
SPIFlashWaitWhenBusy();
}
写状态寄存器还需要去保护,默认的是发出`SPIFlashWriteEnable()`后,即可写状态寄存器,但为了确保万无一失,还是手动在将SRP1和SRP2设置为0,即将状态寄存器1的最高位清零和状态寄存器最低位清零:

static void SPIFlashClearProtectForStatusReg(void)
{
unsigned char reg1, reg2;
reg1 = SPIFlashReadStatusReg1();
reg2 = SPIFlashReadStatusReg2();
reg1 &= ~(1<<7);
reg2 &= ~(1<<0);
SPIFlashWriteStatusReg(reg1, reg2);
}
Flash有两种保护机制,一个是保护状态寄存器,一种是保护存储数据,现在再来清除数据保护。
需要将CMP设置为0的同时,将BP0、BP1、BP2都设置为0:
static void SPIFlashClearProtectForData(void)
{
/* cmp=0,bp2,1,0=0b000 */
unsigned char reg1, reg2;
reg1 = SPIFlashReadStatusReg1();
reg2 = SPIFlashReadStatusReg2();
reg1 &= ~(7<<2);
reg2 &= ~(1<<6);
SPIFlashWriteStatusReg(reg1, reg2);
}
将两个清除写保护都放在一起,作为一个SPI Flash初始化函数:
void SPIFlashInit(void)
{
SPIFlashClearProtectForStatusReg();
SPIFlashClearProtectForData();
}
再来实现擦除,擦除命令需要先发一个0x20的命令,再发出24位的想擦除位置的地址:

/* erase 4K */
void SPIFlashEraseSector(unsigned int addr)
{
SPIFlashWriteEnable(1);
SPIFlash_Set_CS(0);
SPISendByte(0x20);
SPIFlashSendAddr(addr);
SPIFlash_Set_CS(1);
SPIFlashWaitWhenBusy();
}
为了保证擦除成功,需要读取状态寄存器1的的第1位:
static void SPIFlashWaitWhenBusy(void)
{
while (SPIFlashReadStatusReg1() & 1);
}
然后是烧写函数,先发命令0x02,再发出24位地址,最后再逐个发送数据:
/* program */
void SPIFlashProgram(unsigned int addr, unsigned char *buf, int len)
{
int i;
SPIFlashWriteEnable(1);
SPIFlash_Set_CS(0);
SPISendByte(0x02);
SPIFlashSendAddr(addr);
for (i = 0; i < len; i++)
SPISendByte(buf[i]);
SPIFlash_Set_CS(1);
SPIFlashWaitWhenBusy();
}
同前面的擦除操作一样,烧写操作也不是一定是实时的,需要读取状态标志位来判断是否完成。
读函数也是类似的操作,先发命令0x03,再发出24位地址,再逐个读取数据:
void SPIFlashRead(unsigned int addr, unsigned char *buf, int len)
{
int i;
SPIFlash_Set_CS(0);
SPISendByte(0x03);
SPIFlashSendAddr(addr);
for (i = 0; i < len; i++)
buf[i] = SPIRecvByte();
SPIFlash_Set_CS(1);
}
至此,基本的Flash读写功能已经完成,在主函数调用擦除函数擦除4096这个扇区的数据,再往4096这个地方写入字符串,再从该地址读取出来,在串口和OLED打印出来:
SPIFlashEraseSector(4096);
SPIFlashProgram(4096, "100ask", 7);
SPIFlashRead(4096, str, 7);
printf("SPI Flash read from 4096: %s\n\r", str);
OLEDPrint(4,0,str);
第005节_在OLED上显示ADC的值
这节我们在OLED显示ADC电压值,通过调节可调电阻,让ADC的值在屏幕上不断变化。
在JZ2440的主光盘的hardware里面有一个adc_ts触摸屏的程序,把里面的adc_ts.c和adc_ts.h提取出来放在本节视频待写的代码里面。
主函数调用的是Test_Adc.c进行测试adc,因此在里面加上打印和OLED显示函数。
/*
* 测试ADC
* 通过A/D转换,测量可变电阻器的电压值
*/
void Test_Adc(void)
{
float vol0, vol1;
int t0, t1;
char buf[100];
printf("Measuring the voltage of AIN0 and AIN1, press any key to exit\n\r");
while (!awaitkey(0)) // 串口无输入,则不断测试
{
vol0 = ((float)ReadAdc(0)*3.3)/1024.0; // 计算电压值
vol1 = ((float)ReadAdc(1)*3.3)/1024.0; // 计算电压值
t0 = (vol0 - (int)vol0) * 1000; // 计算小数部分, 本代码中的printf无法打印浮点数
t1 = (vol1 - (int)vol1) * 1000; // 计算小数部分, 本代码中的printf无法打印浮点数
printf("AIN0 = %d.%-3dV AIN1 = %d.%-3dV\r", (int)vol0, t0, (int)vol1, t1);
sprintf(buf,"ADC: %d.%-3d, %d.%-3d", (int)vol0, t0, (int)vol1, t1);
OLEDPrint(6, 0, buf);
}
printf("\n");
}
这里调用了一个awaitkey()函数,需要再复制adc_ts触摸屏的程序里serial.c的该函数到本工程里面。
/*
* 接收字符,若有数据直接返回,否则等待规定的时间
* 输入参数:
* timeout: 等待的最大循环次数,0表示不等待
* 返回值:
* 0 : 无数据,超时退出
* 其他值:串口接收到的数据
*/
unsigned char awaitkey(unsigned long timeout)
{
while (!(UTRSTAT0 & RXD0READY))
{
if (timeout > 0)
timeout--;
else
return 0; // 超时,返回0
}
return URXH0; // 返回接收到的串口数据
}
修改Makefile,加入adc_ts.o,编译,报错,涉及除法操作,需要加入数学库:
LDFLASG := -L $(shell dirname $(CC) $(CFLAGS) -print-libgcc-file-name) -lgcc
现在重新编译即可通过。
现在将IIC的的结果也在OLED上显示出来,在主函数添加如下代码:
i2c_init();
at24cxx_write(0, 0x55);
data = at24cxx_read(0);
OLEDClearPage(2);
OLEDClearPage(3);
if (data == 0x55)
OLEDPrint(2,0,"I2C OK!");
else
OLEDPrint(2,0,"I2C Err!");
先初始化iic,在0地址写入0x55,然后再读取出来,判断是否与写入的一样,一样则打印OK,否则打印Err。
为了防止OLED出现之前显示的数据残留,需要再写一个清除Page的函数:
void OLEDClearPage(int page)
{
int i;
OLEDSetPos(page, 0);
for (i = 0; i < 128; i++)
OLEDWriteDat(0);
}
第006节_使用SPI控制器
前面我们都是通过GPIO管脚来实现的SPI通信,这节我们使用2440里面的GPIO控制器来实现SPI通信。
前面使用GPIO发送数据时,是手工的控制时钟线、数据线,我们使用SPI控制器的话,只需要 把数据写入寄存器,它就可以帮我自动那些时钟线和数据线,我们继续在上一节的基础上修改,添加一个文件s3c2440_spi.c和s3c2440_spi.h,同时修改Makefile,替换gpio_spi.c为s3c2440_spi.o。
从初始化函数开始,需要管脚初始化和SPI控制器初始化:
void SPIInit(void)
{
/* 初始化引脚 */
SPI_GPIO_Init();
SPIControllerInit();
}
管脚初始化即需要把SPI相关的CLK、MOSI、MISO配置为对应的功能引脚:
static void SPI_GPIO_Init(void)
{
/* GPF1 OLED_CSn output */
GPFCON &= ~(3<<(1*2));
GPFCON |= (1<<(1*2));
GPFDAT |= (1<<1);
/* GPG2 FLASH_CSn output
* GPG4 OLED_DC output
* GPG5 SPIMISO
* GPG6 SPIMOSI
* GPG7 SPICLK
*/
GPGCON &= ~((3<<(2*2)) | (3<<(4*2)) | (3<<(5*2)) | (3<<(6*2)) | (3<<(7*2)));
GPGCON |= ((1<<(2*2)) | (1<<(4*2)) | (3<<(5*2)) | (3<<(6*2)) | (3<<(7*2)));
GPGDAT |= (1<<2);
}
然后是SPI控制器的初始化,控制器的初始化可以参考芯片手册介绍的编程步骤:
首先是设置波特率,要根据外设所能接受的范围来设置,比如查阅OLED的芯片手册得知其时钟最小值为100ns,即最小为10MHz;Flash时钟支持最大104MHz,为了代码简单,就直接取10MHz,根据等式推出寄存器值:
Baud rate = PCLK / 2 / (Prescaler value + 1) 10 = 50 / 2 / (Prescaler value + 1) Prescaler value = 1.5 = 2
实际的波特率为:50/2/3=8.3MHz
根据参考流程,接下来设置SPI控制寄存器:
[6:5]设置为查询模式: 00 polling mode [4]设置时钟使能: 1 = enable [3]设置为主机模式: 1 = master [2]设置无数据时时钟为低电平: 0 [1]设置工作模式为模式A: 0 = format A [0]设置发送数据时无需读取数据: 0 = normal mode
static void SPIControllerInit(void)
{
/* OLED : 100ns, 10MHz
* FLASH : 104MHz
* 取10MHz
* 10 = 50 / 2 / (Prescaler value + 1)
* Prescaler value = 1.5 = 2
* Baud rate = 50/2/3=8.3MHz
*/
SPPRE0 = 2;
SPPRE1 = 2;
/* [6:5] : 00, polling mode
* [4] : 1 = enable
* [3] : 1 = master
* [2] : 0
* [1] : 0 = format A
* [0] : 0 = normal mode
*/
SPCON0 = (1<<4) | (1<<3);
SPCON1 = (1<<4) | (1<<3);
}
发送数据时,先检查状态寄存器,判断发送/接收数据是否准备好了,准备好后就把数据放在寄存器SPTDAT1里,SPI控制器就自己控制时序把数据自动发送出去了。
void SPISendByte(unsigned char val)
{
while (!(SPSTA1 & 1));
SPTDAT1 = val;
}
接收数据时,先写0xFF到寄存器SPTDAT1,再检查状态寄存器,判断发送/接收数据是否准备好了,准备好后就读取寄存器SPTDAT1,读取出来的就是接收到的数据。
unsigned char SPIRecvByte(void)
{
SPTDAT1 = 0xff;
while (!(SPSTA1 & 1));
return SPRDAT1;
}
第007节_移植到MINI2440_TQ2440
前面在JZ2440上操作了SPI Flash和OLED,这节视频是件前面的代码移植到MINI2440和TQ2440上,如果你使用的是JZ2440,本节视频就不用看了。
MINI2440和TQ2440上的SPI管脚是完全一样的,因此只需移植一个,两者就通用了,先移植GPIO模式版本的,复制前面 04th_spi_i2c_adc_jz2440_ok_020_005 里的代码,复制后的新的命名为 06th_spi_i2c_adc_mini2440_tq2440_gpio_020_007 。
修改 gpio_spi.c ,里面的管脚几乎都变化了,因此需要改 SPI_GPIO_Init() :
static void SPI_GPIO_Init(void)
{
/* GPG1 OLED_CSn output
* GPG10 FLASH_CSn output
*/
GPGCON &= ~((3<<(1*2)) | (3<<(10*2)));
GPGCON |= (1<<(1*2)) | (1<<(10*2));
GPGDAT |= (1<<1) | (1<<10);
/*
* GPF3 OLED_DC output
* GPE11 SPIMISO input
* GPE12 SPIMOSI output
* GPE13 SPICLK output
*/
GPFCON &= ~(3<<(3*2));
GPFCON |= (1<<(3*2));
GPECON &= ~((3<<(11*2)) | (3<<(12*2)) | (3<<(13*2)));
GPECON |= ((1<<(12*2)) | (1<<(13*2)));
}
CLK引脚也变了,修改如下:
static void SPI_Set_CLK(char val)
{
if (val)
GPEDAT |= (1<<13);
else
GPEDAT &= ~(1<<13);
}
SPI的MOSI和MISO也要变化如下:
static void SPI_Set_DO(char val)
{
if (val)
GPEDAT |= (1<<12);
else
GPEDAT &= ~(1<<12);
}
static char SPI_Get_DI(void)
{
if (GPEDAT & (1<<11))
return 1;
else
return 0;
}
对于SPI Flash需要修改其片选引脚,修改 spi_flash.c 里面的片选函数如下:
static void SPIFlash_Set_CS(char val)
{
if (val)
GPGDAT |= (1<<10);
else
GPGDAT &= ~(1<<10);
}
重新编译烧写,测试正常。 再移植SPI控制器版本的,复制前面 05th_spi_i2c_adc_jz2440_spi_controller_020_006 里的代码,复制后的新的命名为 07th_spi_i2c_adc_mini2440_tq2440_spi_controller_020_007 。 同样的首先修改GPIO初始化,修改为配套引脚:
static void SPI_GPIO_Init(void)
{
/* GPG1 OLED_CSn output
* GPG10 FLASH_CSn output
*/
GPGCON &= ~((3<<(1*2)) | (3<<(10*2)));
GPGCON |= (1<<(1*2)) | (1<<(10*2));
GPGDAT |= (1<<1) | (1<<10);
/*
* GPF3 OLED_DC output
* GPE11 SPIMISO
* GPE12 SPIMOSI
* GPE13 SPICLK
*/
GPFCON &= ~(3<<(3*2));
GPFCON |= (1<<(3*2));
GPECON &= ~((3<<(11*2)) | (3<<(12*2)) | (3<<(13*2)));
GPECON |= ((2<<(11*2)) | (2<<(12*2)) | (2<<(13*2)));
}
SPI Flash使用的是SPI0,因此将 SPTDAT1 改为 *SPTDAT1* :
void SPISendByte(unsigned char val)
{
while (!(SPSTA0 & 1));
SPTDAT0 = val;
}
unsigned char SPIRecvByte(void)
{
SPTDAT0 = 0xff;
while (!(SPSTA0 & 1));
return SPRDAT0;
}
修改SPI Flash的片选引脚:
static void SPIFlash_Set_CS(char val)
{
if (val)
GPGDAT |= (1<<10);
else
GPGDAT &= ~(1<<10);
}
最后是OLED的片选和数据/命令控制引脚:
static void OLED_Set_DC(char val)
{
if (val)
GPFDAT |= (1<<3);
else
GPFDAT &= ~(1<<3);
}
static void OLED_Set_CS(char val)
{
if (val)
GPGDAT |= (1<<1);
else
GPGDAT &= ~(1<<1);
}
重新编译、烧写,测试。