“Serial TTY overview”的版本间的差异
| 第22行: | 第22行: | ||
<br/> | <br/> | ||
| − | + | 从内核4.12版本开始,串行设备总线(也称为Serdev)已在TTY框架中引入,以改善为连接到串行端口的设备(例如:蓝牙,NFC,FM无线电和GPS设备)提供的接口 学科“驾驶员”有一些已知的局限性: | |
| − | * | + | * 设备是在用户空间而不是固件中编码的(ACPI的设备树) |
| − | * | + | * “驱动程序”不是内核驱动程序,而是用户空间守护程序 |
| − | * | + | * 内核空间中没有描述相关的资源(GPIO和中断,调节器,时钟,音频接口),这会影响电源管理 |
| − | * | + | * 打开端口时会注册“驱动程序” |
| − | + | Serdev允许将设备连接到UART,而无需了解线路规则限制: | |
| − | * | + | * 新总线类型:串行 |
| − | * | + | * Serdev控制器 |
| − | * | + | * Serdev设备(客户端或从设备) |
| − | * Serdev TTY- | + | * Serdev TTY-端口控制器 |
| − | ** | + | ** 仅内核内控制器实现 |
| − | ** | + | ** 定义客户端时,由TTY驱动程序注册 |
| − | ** | + | ** 客户端由固件(设备树或ACPI)描述 |
<br/> | <br/> | ||
| − | + | STMicroelectronics提供的USART低级驱动程序(“drivers/tty/serial/stm32 USART.c”)支持 | |
| − | + | [https://en.wikipedia.org/wiki/RS-232 RS-232] standard (for serial communication transmission of data), and [https://en.wikipedia.org/wiki/RS-485 RS-485] standard (for [https://en.wikipedia.org/wiki/Modbus modbus]协议应用程序为例)。<br/> | |
| + | Linux<sup>®</sup>低级驱动程序不支持USART同步模式。<br/> | ||
<br/> | <br/> | ||
| − | + | 在以下用例中,TTY框架用于访问串行设备: | |
| − | * '' | + | * Linux启动过程中的“'tty虚拟控制台”' |
| − | * '''pts pseudo-terminal''' | + | * '''pts pseudo-terminal'''通过终端访问 |
| − | * ''' | + | * '''用户空间应用程序''' |
==System overview== | ==System overview== | ||
2020年11月11日 (三) 11:58的版本
本文提供有关 Linux® TTY框架的信息。 它解释了如何激活“”UART“”接口,以及如何从用户和内核空间访问它。
目录
Framework purpose
TTY子系统控制UART设备与使用这些设备的程序之间的通信。
TTY子系统负责:
- 控制异步线路上的物理数据流(包括传输速度,字符大小和线路可用性)。
- 通过识别特殊字符并适应本国语言来解释数据。
- 通过控制终端的概念来控制作业和终端访问。
TTY子系统不支持STM32 USART外设的同步模式。
控制终端管理一组进程的输入和输出操作。 TTY特殊文件(ttyX文件系统条目)支持控制终端接口。
为了执行其任务,TTY子系统由模块(也称为学科)组成。 模块是一组处理规则,它们控制计算机与异步设备之间的通信接口。 可以为每个TTY动态添加和删除模块。
TTY子系统支持三种主要类型的模块:
- TTY驱动程序:TTY驱动程序或硬件规则直接控制硬件(TTY设备)或伪硬件(PTY设备)。 它们通过为适配器上面的模块提供服务来执行对适配器的实际输入和输出。 打开端口时,这些服务是流控制和特殊语义。
- 线学科:线学科提供编辑,作业控制和特殊字符解释。 它们执行入站和出站数据流上发生的所有转换。 生产线规程还为TTY驱动程序执行大多数错误处理和状态监视。
- 转换器模块:转换器模块或映射学科,翻译或映射输入和输出字符。
从内核4.12版本开始,串行设备总线(也称为Serdev)已在TTY框架中引入,以改善为连接到串行端口的设备(例如:蓝牙,NFC,FM无线电和GPS设备)提供的接口 学科“驾驶员”有一些已知的局限性:
- 设备是在用户空间而不是固件中编码的(ACPI的设备树)
- “驱动程序”不是内核驱动程序,而是用户空间守护程序
- 内核空间中没有描述相关的资源(GPIO和中断,调节器,时钟,音频接口),这会影响电源管理
- 打开端口时会注册“驱动程序”
Serdev允许将设备连接到UART,而无需了解线路规则限制:
- 新总线类型:串行
- Serdev控制器
- Serdev设备(客户端或从设备)
- Serdev TTY-端口控制器
- 仅内核内控制器实现
- 定义客户端时,由TTY驱动程序注册
- 客户端由固件(设备树或ACPI)描述
STMicroelectronics提供的USART低级驱动程序(“drivers/tty/serial/stm32 USART.c”)支持
RS-232 standard (for serial communication transmission of data), and RS-485 standard (for modbus协议应用程序为例)。
Linux®低级驱动程序不支持USART同步模式。
在以下用例中,TTY框架用于访问串行设备:
- Linux启动过程中的“'tty虚拟控制台”'
- pts pseudo-terminal通过终端访问
- 用户空间应用程序
System overview
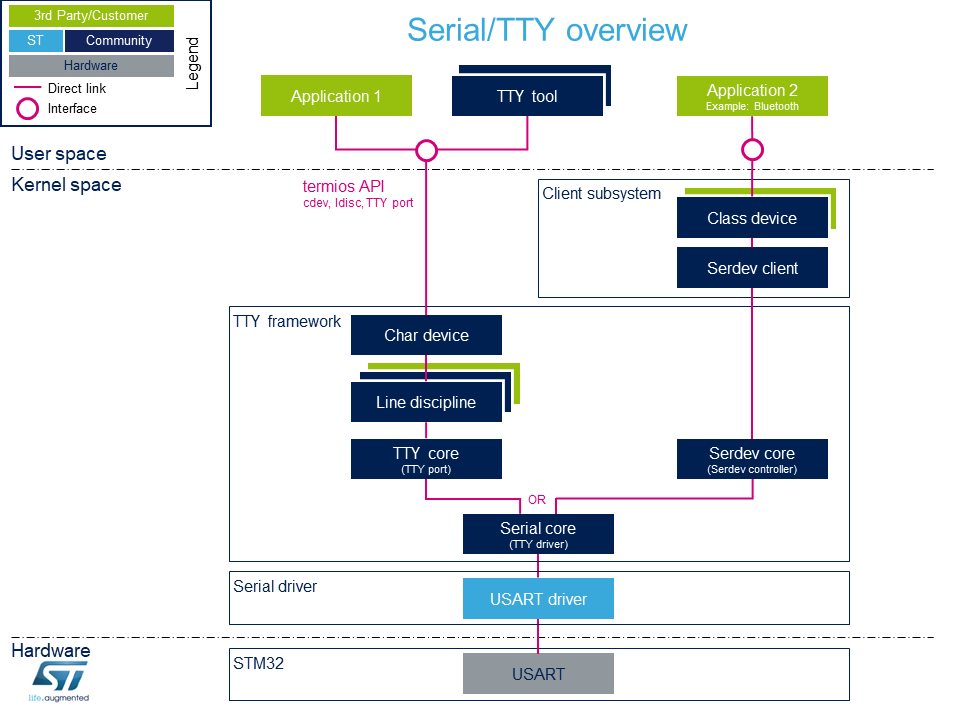
Note: during boot, while a serial device is probed, the serial framework instantiates an associated tty terminal as a virtual device. Then the system sees this tty virtual device as a child of the associated serial device.
Components description
From client application to hardware
- Application: customer application to read/write data from the peripheral connected on the serial port.
- TTY tools: tools provided by Linux community, such as stty, ldattach, inputattach, tty, ttys, agetty, mingetty, kermit and minicom.
- Termios: API which offers an interface to develop an application using serial drivers.
- Client subsystem: kernel subsystem client of serdev core (Example: 蓝牙概述).
- TTY framework: high-level TTY structures management, including drivers/tty/tty_io.c | |}} tty character device driver , drivers/tty | |}} TTY core functions , line discipline and drivers/tty/serdev | |}} Serdev core functions management.
- Serial framework: low-level serial driver management, including the drivers/tty/serial/serial_core.c | |}} serial core functions .
- USART driver: drivers/tty/serial/stm32-usart.c | |}} stm32-usart low-level serial driver for all STM32 family devices.
- STM32 USART: STM32 frontend IP connected to the external devices through a serial port.
APIs description
The TTY provides only character device interface (named /dev/ttyX) to the user space.
The main API for user space TTY client applications is provided by the portable POSIX terminal interface termios, which relies on /dev/ttyX interface for TTY link configuration.
The termios API [1] is a user land API, and its functions describe a general terminal interface that is provided to control asynchronous communications ports.
The POSIX termios API abstracts the low-level details of the hardware, and provides a simple, yet complete, programming interface that can be used for advanced projects. It is a wrapper on character device API [2] ioctl operations.
Note:
If a serial interface is needed at kernel level (to control an external device through U(S)ART by a kernel driver for example), the customer can use a line discipline or a Serdev client.
- The line discipline will be responsible for:
- creating this new kernel API
- routing data flow between the serial core and the new kernel API
- The Serdev provides an interface to kernel drivers.
- This interface resembles line-discipline operations: open and close, terminal settings, write, modem control, read (callback), and write wakeup (callback)
Configuration
This section describes how to configure a device on a serial port.
Kernel Configuration
The serial driver, serial framework, and TTY framework are activated by default in ST deliveries. Nevertheless, if a specific configuration is needed, this section indicates how IIO can be activated/deactivated in the kernel.
Activate the device TTY in kernel configuration with Linux Menuconfig tool.
For TTY, select:
Device Drivers --->
Character devices --->
[*] Enable TTY
Allows to remove the TTY support which can save space, and blocks features that require TTY from inclusion in the kernel.
The TTY is required for any text terminals or serial port communication. Most users should leave this enabled.
For the STM32 serial driver, select:
Device Drivers --->
Character devices --->
Serial drivers --->
<*> STMicroelectronics STM32 serial port support
[*] Support for console on STM32
This driver is for the on-chip serial controller on STMicroelectronics STM32 MCUs.
The USART supports Rx and Tx functionality. It supports all industry standard baud rates.
Device tree configuration
The UART configuration thanks to the device tree is described in the dedicated article Serial TTY device tree configuration.
How to use TTY
This section describes how to use TTY from the user land (from a terminal or an application) and from the kernel space, based on the two following use cases:
- How to configure the serial port by using the termios structure
- How to send/receive data
The termios structure allows to configure communication ports with many settings, such as :
- Baud rate
- Character size mask
- Parity bit enabling
- Parity and framing errors detection settings
- Start/stop input and output control
- RTS/CTS (hardware) flow control
- ...
As the USART internal peripheral supports 7, 8 and 9 word length data, the following termios character size and parity bit configurations are supported:
- CS6 with parity bit
- CS7 with or without parity bit
- CS8 with or without parity bit
Tips to use TTY:
- How to use TTY from user terminal: TTY usage from a user terminal is described in a dedicated article, How to use TTY from a user terminal
- How to use TTY from an application: TTY usage from an application is described in a dedicated article, 如何从应用程序调用TTY
- TTY line discipline: TTY line discipline is described in a dedicated article, Serial TTY line discipline
How to trace and debug the framework
How to monitor
As Debugfs does not propose any information about serial or TTY frameworks, the way to monitor Serial and TTY frameworks is to use the linux kernel log method (based on printk) described in Dmesg和Linux内核日志 article.
How to trace
Kernel boot log
The following extract of kernel boot log shows a serial driver properly probed:
[ 0.793340] STM32 USART driver initialized [ 0.798779] 4000f000.serial: ttySTM1 at MMIO 0x4000f000 (irq = 25, base_baud = 4000000) is a stm32-usart [ 0.808875] stm32-usart 4000f000.serial: interrupt mode used for rx (no dma) [ 0.816106] stm32-usart 4000f000.serial: interrupt mode used for tx (no dma) [ 0.824253] 40010000.serial: ttySTM0 at MMIO 0x40010000 (irq = 27, base_baud = 4000000) is a stm32-usart [ 0.833796] console [ttySTM0] enabled [ 0.833796] console [ttySTM0] enabled [ 0.840862] bootconsole [earlycon0] disabled [ 0.840862] bootconsole [earlycon0] disabled [ 0.850132] stm32-usart 40010000.serial: interrupt mode used for rx (no dma) [ 0.855755] stm32-usart 40010000.serial: interrupt mode used for tx (no dma)
dmesg output information
The system log shows the UART devices and associated TTY terminals registered during the probe.
Board $> dmesg | grep ttySTM* [ 0.000000] Kernel command line: root=/dev/mmcblk0p5 rootwait rw earlyprintk console=ttySTM1,115200 # ttySTM1 terminal is associated with usart3 (4000f000.serial) # [ 0.798779] 4000f000.serial: ttySTM1 at MMIO 0x4000f000 (irq = 25, base_baud = 4000000) is a stm32-usart # ttySTM0 terminal is associated with uart4 (40010000.serial) for console# [ 0.824253] 40010000.serial: ttySTM0 at MMIO 0x40010000 (irq = 27, base_baud = 4000000) is a stm32-usart # ttySTM0 terminal is activated by default for console # [ 0.833796] console [ttySTM0] enabled
Dynamic trace
A detailed dynamic trace is available in How to use the kernel dynamic debug
Board $> echo "file drivers/tty/* +p" > /sys/kernel/debug/dynamic_debug/control
This command enables all the traces related to the TTY core and drivers at runtime.
A finer selection can be made by choosing only the files to trace.
| Reminder: loglevel needs to be increased to 8 by using either boot arguments or the dmesg -n 8 command through the console |
How to debug
While a TTY serial port is instantiated, the TTY core exports different files through devfs, sysfs and procfs.
devfs
- The repository /dev contains all the probed TTY serial devices.
Board $> ls /dev/ttySTM* # ttySTM1 and ttySTM0 terminals are probed # /dev/ttySTM1 /dev/ttySTM0
sysfs
- /sys/class/tty/ lists all TTY devices which ttySx correspond to serial port devices.
Board $> ls /sys/class/tty/*/device/driver /sys/class/tty/ttySTM1/device/driver -> ../../../../bus/platform/drivers/stm32-usart /sys/class/tty/ttySTM0/device/driver -> ../../../../bus/platform/drivers/stm32-usart
- /sys/devices/platform/soc/ lists all the usart devices probed
Board $> ls -d /sys/devices/platform/soc/*.serial # Serial devices 4000f000.serial (usart3) and 40010000.serial (uart4) are probed # /sys/devices/platform/soc/4000f000.serial /sys/devices/platform/soc/40010000.serial
- /sys/devices/platform/soc/device.serial/tty lists the TTY terminal associated to a serial device
Board $> ls /sys/devices/platform/soc/4000f000.serial/tty/ # ttySTM1 is associated to serial device 4000f000.serial (usart3) # ttySTM1
procfs
- The repository /proc/device-tree lists all the usart devices declared in the device-tree, including the disabled ones.
Board $> ls -d /proc/device-tree/soc/serial@* /proc/device-tree/soc/serial@4000e000 /proc/device-tree/soc/serial@40010000 /proc/device- tree/soc/serial@40018000 /proc/device-tree/soc/serial@44003000 /proc/device-tree/soc/serial@4000f000 /proc/device-tree/soc/serial@40011000 /proc/device- tree/soc/serial@40019000 /proc/device-tree/soc/serial@5c000000
Then for each device listed, device-tree properties are available.
Board $> ls /proc/device-tree/soc/serial@40010000/ clock-names compatible interrupts-extended name pinctrl-0 pinctrl-names reg wakeup-source clocks interrupt-names linux,phandle phandle pinctrl-1 power-domains status
- As an example, the status entry provides the status of the device in the device tree node.
Board $> cat /proc/device-tree/soc/serial@40010000/status # status of device serial@40010000 (uart4) is set to "okay" in the device tree # okay
- The file /proc/interrupts lists the interrupts for active serial ports.
Board $> cat /proc/interrupts | grep serial 26: 0 0 GIC-0 71 Level 4000f000.serial 27: 0 0 stm32-exti-h 28 Edge 4000f000.serial 28: 13509 0 GIC-0 84 Level 40010000.serial 29: 0 0 stm32-exti-h 30 Edge 40010000.serial
- The file /proc/tty/driver/stm32-usart lists serial core counters and modem information for each serial instance.
- Driver information:
- serial driver name
- serial device start address
- irq number
- Counters:
- tx: Number of bytes sent
- rx: Number of bytes received
- fe: Number of framing errors received
- pe: Number of parity errors received
- brk: Number of break signals received
- oe: Number of overrun errors received
- bo: Number of framework buffer overrun errors received
- Modem information:
- RTS: Request To Send
- CTS: Clear To Send
- DTR: Data Terminal Ready
- DSR: Data Set Ready
- CD: Carrier Detect
- RI: Ring Indicator
Board $> cat /proc/tty/driver/stm32-usart serinfo:1.0 driver revision: 0: uart:stm32-usart mmio:0x40010000 irq:29 tx:22722 rx:2276 RTS|CTS|DTR|DSR|CD 1: uart:stm32-usart mmio:0x4000F000 irq:27 tx:0 rx:1149 fe:121 oe:2 pe:296 brk:3 RTS|CTS|DTR|DSR|CD 3: uart:stm32-usart mmio:0x4000E000 irq:25 tx:0 rx:0 CTS|DSR|CD
How to go further
The Linux community provides many detailed documentation about Linux serial/TTY. Please find below a selection of the most relevant ones:
- Linux Serial-HOWTO [3] describes how to set up serial ports from both hardware and software perspectives.
- Serial Programming Guide for POSIX Compliant Operating Systems [4] , by Michael Sweet.
More information can be found in the following web articles in order to get a good understanding of the Linux TTY framework:
References
- ↑ termios API, Linux Programmer's Manual termios API Documentation (user land API with serial devices)
- ↑ Character device API overview, Accessing hardware from userspace training, Bootlin documentation
- ↑ Linux Serial-HOWTO, tdlp.org training document, describes how to set up serial ports from both hardware and software perspectives
- ↑ Serial Programming Guide for POSIX Compliant Operating Systems, by Michael Sweet, training document
- ↑ TTY Subsystem, by IBM
- ↑ The TTY demystified TTY subsystem presentation article, by Linus Akesson
- ↑ Linux serial drivers training Linux Serial Drivers training, by Bootlin
- ↑ Linux Serial Drivers Serial drivers article describing data flows, by Alessandro Rubini
- ↑ The Serial Device Bus Serdev framework presentation, by Johan Hovold
<securetransclude src="ProtectedTemplate:PublicationRequestId" params="15053 | 2020-02-21 | 8368 (BrunoB - 2018-08-31)"></securetransclude> <securetransclude src="ProtectedTemplate:ArticleBasedOnModel" params="Framework overview article model"></securetransclude>